A step towards a unifying model for eye movements
Dr. Gustavo Gasaneo


Motivations
To understand the human being and their interactions as a physical object
The sociology is a sort of thermodinamic where the particles are human beings
Motivations
Motivations
Motivations
Motivations
The eye anatomy
The orbit
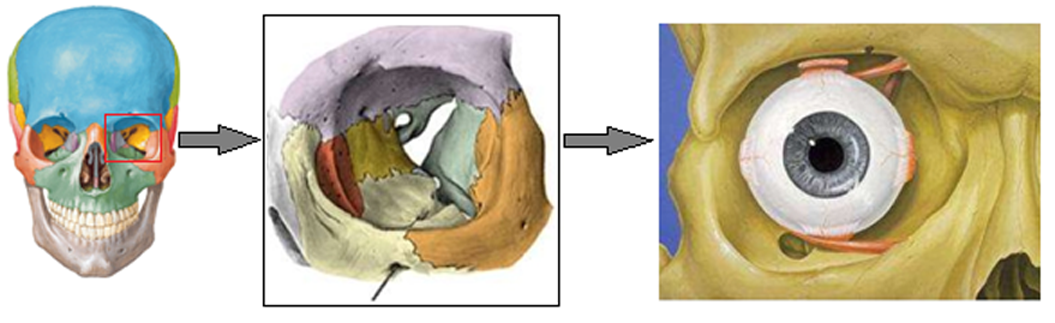
Eye Muscles
Ocular Movements
Physical Model
Muscles Model
Hill's Model (1938)
Active Component
$F_{act}=F_0 f_l(\tilde{l}_m)f_v(\tilde{v}_m) a(t)$
Muscular Activation
$\frac{da(t)}{dt}+[ \frac{1}{\tau_{act}}(\beta+(1-\beta)u(t))] a(t)=\frac{1}{\tau_{act}}u(t)$
where
$ 0 < \beta <1 $and $\tau_{act}$
is a constant of temporal activation.
Tendon Elastic Force
$\dot{F}_t=K_t(F_t)\dot{l}_t$
where $K_t(F_t)$ represents the relation between the force and the length
Total force of the muscle
Ocular Dynamic
The equation for the muscle of mass $M_m$ is
$M_m \ddot{l}_m = F_t \cos \alpha - \cos^2 \alpha (F_{act}+F_{pe} +B_m \dot{l}_m) + \frac{M_m \dot{l}_m^2 \tan^2 \alpha}{l_m}$
The momenta equations for the six muscles give
$(\vec{r}_{ri}\times \vec{F}_{ri})+(\vec{r}_{re}\times \vec{F}_{re})+$
$+(\vec{r}_{os}\times \vec{F}_{os})+(\vec{r}_{oi}\times \vec{F}_{oi}) +(\vec{r}_{om}\times \vec{F}_{om})+(\vec{r}_{om}\times \vec{F}_{om})+ \vec{M}_{s}= J_G \dot{\vec{\omega}}$
Horizontal saccadic movements.
Only 2 muscles are involved.
Physical representation
of the eye
Introducing the state vector:
$x^T(t)=[\Theta \, \, \, \dot{\Theta} \, \, \, l_{m1} \, \, \, \dot{l}_{m1} \, \, \, l_{m2} \, \, \, \dot{l}_{m2} \, \, \, F_{t1} \, \, \, F_{t2} \, \, \, a_1 \, \, \, a_2]$
the equations for the motion of the eyes are:
Simulations
As an example, we use the initial state vector:
$x^T(0)=[0 \, \, \, 0 \, \, \, 4 \, \, \, 0 \, \, \, 4 \, \, \, 0 \, \, \, 20 \, \, \, 20 \, \, \, .17 \, \, \, .17]$( Robinson, D.A., J. of Physiol., 174:245-264, (1964) )
and solve numerically the system of equation
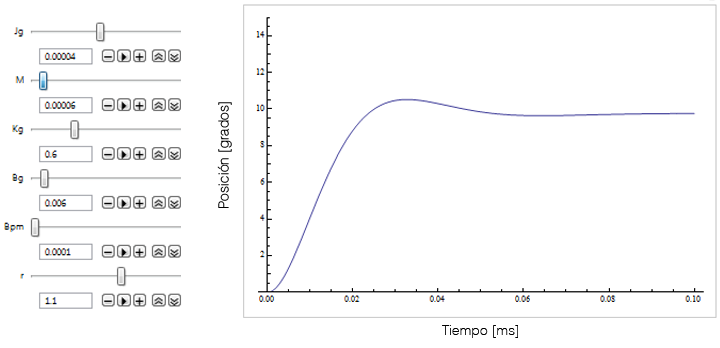
Results
10° saccadic movement (Position-time)
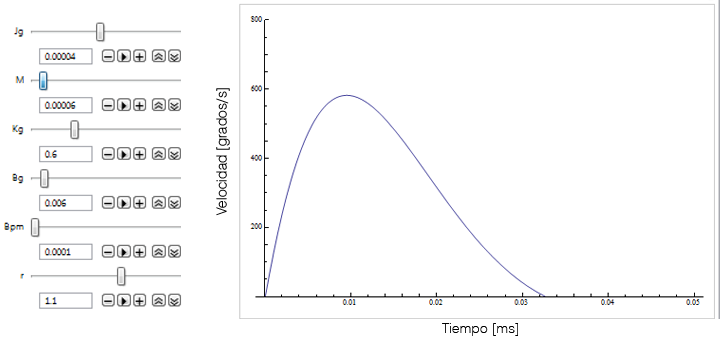
Results
10° saccadic movement (Velocity-tiempo)
Conclusions
& perspectives
- A much more elaborate physical representation for the eye is needed
- A careful study of the muscles structure is required
- A careful and complete mathematical representation for the eye muscle is still needed
- To stablish a closer link between eye movement and reading in physics and mathematics
- To link more closely attention with saccades and microsaccades